Poincare transformations
Posted by peeterjoot on July 6, 2009
[Click here for a PDF of this post with nicer formatting]
Motivation
In ([1]) a Poincare transformation is used to develop the symmetric stress energy tensor directly, in contrast to the non-symmetric canonical stress energy tensor that results from spacetime translation.
Attempt to decode one part of this article, the use of a Poincare transformation.
Incremental transformation in GA form.
Equation (11) in the article, is labeled an infinitesimal Poincare transformation

It is stated that an antisymmetrization condition 

This transformation is less restricted than a plain old spacetime transformation, as it also contains a projective term, where 

Writing as usual

So that components are recovered by taking dot products, as in

For the bivector term, write

For

This allows for an identification 

Where 

Is this what a Poincare transformation is? The Poincare Transformation article suggests not. This article suggests that the Poincare transformation is a spacetime translation plus a Lorentz transformation (composition of boosts and rotations). That Lorentz transformation will not be antisymmetric however, so how can these be reconciled? The key is probably the fact that this was an infinitesimal Poincare transformation so lets consider a Taylor expansion of the Lorentz boost or rotation rotor, considering instead a transformation of the following form

In particular, let’s look at the Lorentz transformation in terms of the exponential form

Here 


Ignoring the translation in (3) for now, to calculate the first order term in Taylor series we need
where

Now, what is the grade of the product 




Since 
Or

Antisymmetry rules out grade zero and four terms, leaving only the possibility of grade 2. That leaves

And the first order Taylor expansion around 

This has close to the postulated form in (2), but differs in one notable way. The dot product with the antisymmetric form 


Replaying this argument in fast forward for the inverse transformation should give us a relation for


So we have our incremental transformation given by
Consider a specific infinitesimal spatial rotation.
The signs and primes involved in arriving at (5) were a bit confusing. To firm things up a bit considering a specific example is called for.
For a rotation in the 

Here also it is easy to get the signs wrong, and it is worth pointing out the sign convention picked here for the Dirac basis is 

and
For 

(leaving the perpendicular basis directions unchanged).
Summarizing the action on the basis vectors in matrix form this is

Observe that the basis vectors transform with the transposed matrix to the coordinates, and we have

Dotting 

In matrix form this is the expected and familiar rotation matrix in coordinate form
Moving on to the initial verification we have
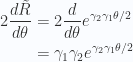
So we have

The antisymmetric form 

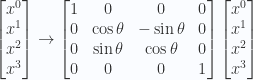
As a final check let’s look at the action of rotation part of the transformation (8) on the coordinates 




Now compare to the incremental transformation on the coordinates in matrix form. That is

So acting on the coordinate vector
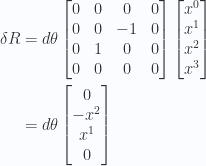
This is exactly what we got above with the bivector dot product. Good.
Consider a specific infinitesimal boost.
For a boost along the

Verifying, we have


Dot products recover the familiar boost matrix
Now, how about the incremental transformation given by (5). A quick calculation shows that we have

Just like the (8) case for a rotation in the 
This completes the examination of two specific incremental Lorentz transformations. It is clear that the result will be the same for an arbitrarily oriented bivector, and the original guess (2) of a geometric equivalent of tensor relation (1) was correct, provided that
The specific case not treated however are those transformations where the orientation of the bivector is allowed to change. Parameterizing that by angle is not such an obvious procedure.
In tensor form.
For an arbitrary bivector 

So we have
The denominator can be subsumed into 
References
[1] M. Montesinos and E. Flores. {Symmetric energy-momentum tensor in Maxwell, Yang-Mills, and Proca theories obtained using only Noether’s theorem}. Arxiv preprint hep-th/0602190, 2006.

Cartanian said
Very interesting, Peeter. The Lie algebra of the Poincare group generators includes
![\left[ M_{ab}, P_c \right]= \eta_{ac}P_b-\eta_{bc}P_a](https://s0.wp.com/latex.php?latex=%5Cleft%5B+M_%7Bab%7D%2C+P_c+%5Cright%5D%3D+%5Ceta_%7Bac%7DP_b-%5Ceta_%7Bbc%7DP_a&bg=fafcff&fg=2a2a2a&s=0&c=20201002)
where M is a Lorentz generator and P the translation generators.
If we substitute
can we find P ?
Cartanian said
Whoops, I meant this,
peeterjoot said
I’m not yet familiar with Lie Algebras. What is the definition of ? I presume these are differential operators of some sort?
? I presume these are differential operators of some sort?
Cartanian said
I’m assuming that bivectors are the generators rotations and boosts. Expanding the first equation I wrote above for spatial rotations gives three equations
Is there a scalar or vector or multivector that can satisfy this ? I think it has to a vector since it has 4 components.
peeterjoot said
By process of elimination.
1. Suppose is a vector,
is a vector,  , with
, with  scalars, then we’d have
scalars, then we’d have
This is a vector, whereas your expression would be a scalar, so it doesn’t look like what you are after.
2. Suppose is a bivector,
is a bivector,  , then the commutator will be a bivector not a vector. This is a messier expansion (perhaps there’s a clever way to do it, but I don’t know what it is).
, then the commutator will be a bivector not a vector. This is a messier expansion (perhaps there’s a clever way to do it, but I don’t know what it is).
If you let
you have
This looks something like what you are after, but has one too many non-free indexes. That leaves just a trivector bivector product to consider … but I’d rather go for a hot tub right now then consider that case;)
Cartanian said
Given these equations,
I think there’s a solution of the form
I think this makes physical sense, because the action of a P will be written
as an antisymmetric function which will mean P_a acts in the ‘a’ direction as it should.
I’ll try and explicate this later.
Cartanian said
Does the latext have to be in one line ?
$latex\begin{align}P_aP_b-P_bP_a &= 0\\(\gamma_a\gamma_b)P_c-P_c(\gamma_a\gamma_b) &= \eta_{ac}P_b\eta_{bc}P_a\end{align}$
peeterjoot said
yup, one line, and you have to use {aligned} instead of {align}. I edited your initial comment. If you want, I have a script that converts standalone latex to wordpress latex here:
tex2blog
There’s some other such scripts around, but I didn’t find one that handled multiple argument latex macros well (and I didn’t know php well enough to try to muck with them).
Cartanian said
I give up.
Cartanian said
Hi Peeter,
your workings in post 3 are what’s needed. I’ve been attempting the same but with less progress. It’s not as straightforward as I thought. The P’s also have to satisfy
‘Cartanian’
Vector Dot Product | Engineer Sphere said
[…] Poincare transformations […]