[Click here for a PDF of this post with nicer formatting (especially if my latex to wordpress script has left FORMULA DOES NOT PARSE errors.)]
Motivation.
A problem from this years phy1530 problem set 2 that appears appropriate for phy454 exam prep.
Statement.
Consider the steady flow between two long cylinders of radii  and
and  ,
,  , rotating about their axes with angular velocities
, rotating about their axes with angular velocities  ,
,  . Look for a solution of the form, where
. Look for a solution of the form, where  is a unit vector along the azimuthal direction:
is a unit vector along the azimuthal direction:
\begin{subequations}


\end{subequations}
This is also a problem that I recall was outlined in section 2 from [1]. Some of the instabilities that are mentioned in the text are nicely illustrated in [2].
We illustrate our system in figure (1).

Figure 1: Coutette flow configuration
Solution: Part 1. Navier-Stokes and resulting differential equations.
Navier-Stokes for steady state incompressible flow has the form
\begin{subequations}


\end{subequations}
where the gradient has the form

Let’s first verify that the incompressible condition 3.3b is satisfied for the presumed form of the solution we seek. We have

Good. Now let’s write out the terms of the momentum conservation equation 3.3a. We’ve got
and
and
Equating  and components we have two equations to solve
and components we have two equations to solve
\begin{subequations}


\end{subequations}
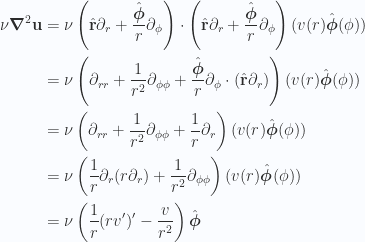
Expanding out our velocity equation we have

for which we’ve been told to expect that 2.2 is a solution (and it has the two integration constants we require for a solution to a homogeneous equation of this form). Let’s verify that we’ve computed the correct differential equation for the problem by trying this solution

Given the velocity, we can now determine the pressure up to a constant
so

Solution: Part 2. Fixing the constants.
To determine our integration constants we recall that velocity associated with a radial position  in cylindrical coordinates takes the form
in cylindrical coordinates takes the form

where  is the angular velocity. The cylinder walls therefore have the velocity
is the angular velocity. The cylinder walls therefore have the velocity

so our boundary conditions (given a no-slip assumption for the fluids) are

This gives us a pair of equations to solve for  and
and 

Multipling each by and respectively gives us

Rearranging for we find

or

For we have
or

This gives us
\begin{subequations}


\end{subequations}
Solution: Part 3. Friction and torque.
We can expand out the identity for the traction vector

in cylindrical coordinates and find
\begin{subequations}






\end{subequations}
so we have
\begin{subequations}



\end{subequations}
We want to expand the last of these

So the traction vector, our force per unit area on the fluid at the inner surface (where the normal is ), is

and our torque per unit area from the inner cylinder on the fluid is thus

Observing that our stress tensors flip sign for an inwards normal, our torque per unit area from the outer cylinder is

For the complete torque on the fluid due to a strip of width  the magnitudes of the total torque from each cylinder are respectively
the magnitudes of the total torque from each cylinder are respectively


As expected these torques on the fluids sum to zero

Evaluating these at and respectively gives us the torques on the fluid by the cylinders, so inverting these provides the torques on the cylinders by the fluid

For the outer cylinder the total torque on a strip of width is

References
[1] D.J. Acheson. Elementary fluid dynamics. Oxford University Press, USA, 1990.
[2] Wikipedia. Taylor-couette flow — wikipedia, the free encyclopedia [online]. 2012. [Online; accessed 10-April-2012]. http://en.wikipedia.org/w/index.php?title=Taylor\%E2\%80\%93Couette_flow&oldid=483281707.




 and
and  . You should find that these equations have relatively simple solutions, i.e.,
. You should find that these equations have relatively simple solutions, i.e.,


